








Projektowanie systemów termowizyjnych

Jakub Sobek
Jak dobrać właściwe do danego projektu rozwiązanie i uniknąć najczęściej popełnianych błędów projektowych.
Tradycyjne kamery są obecnie naturalnym elementem wielu systemów zabezpieczenia technicznego, często jednak służą jedynie do dokumentowania zdarzeń, a nie do aktywnego wykrywania intruza, zanim jeszcze zdąży dokonać kradzieży czy zniszczenia. Dlatego projektanci systemów coraz częściej zwracają się w stronę bardziej zaawansowanych rozwiązań – takich systemów, które pozwolą zrezygnować z ochrony fizycznej na rzecz rozwiązań technicznych.
Angielska firma Trigion świadcząca usługi ochrony obiektów i patrolowania zauważa na swojej stronie internetowej, że termowizja jest jedną z technologii, która pozwala świadczyć usługi na zupełnie nowym poziomie. Jako przykład przywołuje jeden ze swoich projektów: zabezpieczenie dużego złomowiska. Chroniony obszar jest rozległy, a na jego terenie składuje się mnóstwo materiałów różnego typu. Taka złożoność monitorowanej sceny sprawia, że trudno zauważyć intruza za pomocą tradycyjnych kamer CCTV. Trzeba też pamiętać, że jeśli ludzkim okiem trudno dostrzec np. osobę na ekranie, tym trudniejsze będzie to dla algorytmów analizy wizyjnej. Niejednokrotnie to rozwiązanie stanie się nieskuteczne.
Kamera termowizyjna pozwala natomiast na zauważenie obiektu cieplejszego od tła i precyzyjne określenie sposobu jego przemieszczania się. Dobry kontrast między tłem a obiektem zapewnia skuteczniejsze działanie analizy wideo. Obszary detekcji można modyfikować wraz ze zmianą rozkładu materiału w obrębie złomowiska, co sprawia, że cały system jest bardzo elastyczny.
Termowizja coraz częściej staje się elementem oferty czołowych producentów kamer. Jeszcze kilka lat temu rozwiązania te były dostępne jedynie w kilku firmach, które specjalizowały się tylko w tej technologii. Ta zmiana dowodzi, że rynek zauważył ten trend i docenił skuteczność takich rozwiązań. Kamery termowizyjne coraz chętniej są używane także na rynku polskim. Wiele osób podchodzi jednak do tej technologii z pewną obawą, wynikającą zazwyczaj z niewiedzy w tej materii. W projektach są często popełniane te same podstawowe błędy.
Przyjrzyjmy się zatem głównym aspektom technicznym kamer termowizyjnych.
Technologia kamer termowizyjnych
Pierwsze kamery termowizyjne pojawiły się na przełomie lat 40. i 50. ubiegłego wieku. Początkowo działały na zasadzie skanowania liniowego. Na uzyskanie pojedynczego obrazu kamera potrzebowała około godziny. Były to w tamtych czasach rozwiązania tworzone na potrzeby amerykańskiego wojska i miały stanowić jeden z elementów wyposażenia systemów obrony przeciwlotniczej. Od lat 50. można zauważyć znaczny postęp w rozwoju nowoczesnych materiałów i wiele innowacji w zakresie produkcji oraz projektowania urządzeń termowizyjnych. Przez te wszystkie lata nastąpił także duży rozwój w dziedzinie optoelektroniki, który stanowi podstawę technologii termowizyjnej. Pojawienie się nowych materiałów i nanostruktur sprawiło, że nowe rozwiązania są znacznie mniejsze i wydajniejsze niż te sprzed lat.
Podczerwień to część widma elektromagnetycznego znajdująca się poza zakresem światła widzialnego dla ludzkiego oka. Z promieniowaniem podczerwonym wiąże się kilka praw opisujących jego charakter. Najważniejsze z nich to prawo Kirchhoffa, prawo Stefana-Boltzmanna, prawo Plancka oraz prawo Wiena. Nie wchodząc głębiej w szczegółowe ich opisy, warto zaznaczyć podstawowe założenia. Pozwalają one lepiej zrozumieć działanie kamer termowizyjnych oraz wszelkich aspektów związanych z obrazowaniem w tym paśmie.
W roku 1859 Gustav Kirchhoff zauważył, że każdy materiał, który dobrze pochłania promieniowanie podczerwone jest także dobrym radiatorem. Ciało pochłaniające całe promieniowanie nazywa się ciałem doskonale czarnym. Odwrotnością jest ciało doskonale białe, czyli takie, które całkowicie odbija promieniowanie. Ciała takie w przyrodzie praktycznie nie występują, przyjmowane są do budowania teoretycznych modeli fizycznych.
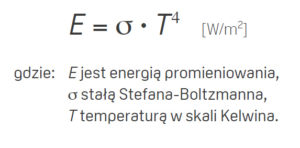
Prawo Stefana-Boltzmanna opisuje całkowitą energię wypromieniowywaną przez ciało doskonale czarne w danej temperaturze. Łatwo zauważyć, że nie zależy ona od długości fali, a jedynie od temperatury tego ciała:
 Szczegółową znajomość zagadnień fizycznych związanych z termowizją powinny posiadać osoby, które zajmują się konstrukcją kamer termowizyjnych, wykonują ich kalibrację lub prowadzą badania naukowe dotyczące radiometrii. Dla stosujących kamery w systemach zabezpieczenia technicznego wiedza ta może okazać się pomocna, ale nie jest konieczna. Takie podstawy fizyczne na tym etapie są wystarczające.
Szczegółową znajomość zagadnień fizycznych związanych z termowizją powinny posiadać osoby, które zajmują się konstrukcją kamer termowizyjnych, wykonują ich kalibrację lub prowadzą badania naukowe dotyczące radiometrii. Dla stosujących kamery w systemach zabezpieczenia technicznego wiedza ta może okazać się pomocna, ale nie jest konieczna. Takie podstawy fizyczne na tym etapie są wystarczające.
Podczerwień to obszar widma elektromagnetycznego obejmujący 0,7–1000 µm. Jest to zakres fal leżący pomiędzy światłem widzialnym a promieniowaniem mikrofalowym. Znaczna część tego spektrum nie jest jednak dostępna dla kamer termowizyjnych. Wiele długości fal jest pochłanianych przez gazy znajdujące się w atmosferze ziemskiej. Istotne są nazywane potocznie tzw. okna widmowe lub okna transmisji atmosferycznej. Określają pasma, które mogą zostać wykorzystane. Wyróżniamy cztery podstawowe pasma: bliska podczerwień NIR, 0,8–1,1 µm, krótka podczerwień SWIR, 0,9–2,5 µm, średnia podczerwień MWIR 3–5 µm oraz daleka podczerwień LWIR 7–14 µm.
Pasma NIR i SWIR są zbliżone do pasma światła widzialnego (od strony jego najdłuższych fal). Fale te zachowują się podobnie jak światło widzialne. Promieniowanie w tych pasmach musi zostać wyemitowane z jakiegoś źródła, aby następnie odbić się od obiektu, na który pada, i trafić do obiektywu kamery. Dopiero wtedy można uzyskać obraz dobrej jakości. Dotyczy to wszystkich kamer CCTV, które mają wbudowane oświetlacze podczerwieni.
Z powodu braku zrozumienia różnić związanych z długościami fal wiele osób potocznie nazywa kamery różnego typu, stosując wymiennie określenie „kamery na podczerwień” i „kamery termowizyjne”.
Trzeba zaznaczyć, że istnieje wyraźna granica pomiędzy rozwiązaniami tego typu. Kamery termowizyjne to (dopiero) te kamery, które operują w pasmach MWIR oraz LWIR. Ze względu na inne długości fal niż światło widzialne kamery muszą być wyposażone w inny detektor promieniowania niż tradycyjnie używane kamery. To główny element różnicujący je.
Czujnik podczerwieni jest elementem, który przez lata ewoluował. Na początku był to pojedynczy detektor ze skanowaniem optyczno-mechanicznym. W latach 70. zaczęto produkować pierwsze kamery oparte na matrycach wielopikselowych FPA (Focal Plane Array). Obecnie dostępne na rynku przetworniki obrazu można podzielić na dwa typy: chłodzone i niechłodzone. Przetworniki niechłodzone są przystosowane do pracy w oknie widmowym LWIR, chłodzone zaś w oknie MWIR. Poza wieloma różnicami technicznymi w sposobie działania i budowie tych detektorów niestety najczęściej kluczowa jest różnica ich ceny.
Detektory niechłodzone są wielokrotnie tańsze od tych dla fal MWIR. W wielu aplikacjach nie stanowi to jednak większego problemu, ponieważ obecnie jakość niechłodzonych przetworników jest tak wysoka, że mogą one pracować na dystansach nawet do 8000 m. Zatem jedynie wtedy, kiedy monitorowane są bardzo duże odległości (np. ochrona granic, portów, lotnisk, obiektów wojskowych) czy przy bojowych zastosowaniach wojskowych wykorzystuje się kamery chłodzone.
Kolejnym elementem różnicującym kamery tradycyjne od termowizyjnych jest stosowana w nich optyka. Promieniowanie podczerwone jest blokowane przez szkło, przez co w kamerach termowizyjnych nie można używać tradycyjnej optyki. Istnieje wiele pierwiastków, z których wykonuje się obiektywy do takich kamer. Jednym z nich jest german, który ma bardzo dobre parametry fizyczne. Materiał ten jest nieprzepuszczalny dla światła widzialnego, a przepuszcza fale o długości 2–14 µm.
Oprócz kamer german jest także stosowany w czujkach podczerwieni, pirometrach czy medycznych przyrządach pomiarowych. Ważnymi jego cechami są nietoksyczność, duża twardość i wytrzymałość. Dzięki temu dobrze wykonane obiektywy kamer są bardziej odporne na uszkodzenia. Dodatkowe warstwy powlekające german zwiększają wytrzymałość i zmniejszają refleksyjność ich powierzchni. Dzięki temu więcej energii podczerwieni trafia do wnętrza kamery. W efekcie obraz jest lepszej jakości, ma wyższy kontrast nawet w przypadku niskiej różnicy temperaturowej pomiędzy tłem a obiektem.
Trzecim elementem każdej kamery termowizyjnej jest procesor sygnałowy – DSP (Digital Signal Processor).
Wcześniej ten element kamery był odpowiedzialny za przeprowadzanie prostych operacji na obrazie, takich jak zmiana jasności obrazu, kontrastu czy np. wyostrzanie krawędzi na obrazie. Dzisiaj DSP jest wyposażany w dodatkowe funkcje znacząco rozszerzające funkcjonalność kamer, w tym także termowizyjnych. Współczesne procesory stosowane w kamerach termowizyjnych stanowią tak naprawdę połączenie procesorów graficznych z procesorami DSP oraz RISC (Reduced Instruction Set Computing). Umożliwia to budowanie rozwiązań łączących architekturę 8-, 16- oraz 32-bitową wraz ze zmiennoprzecinkową arytmetyką 16- i 32-bitową. Wielordzeniowa architektura takich procesorów oraz kontrolowana przez oprogramowanie pamięć podręczna tworzą konfigurację, która pozwala osiągnąć wysoką wydajność. Wszystko to przy zachowaniu niskiego poboru mocy. Niskie zapotrzebowanie energetyczne jest szczególnie istotne, gdyż projektanci zawsze starają się zasilać kamery IP za pomocą PoE, a w klasie 3. występują ograniczenia do 15,4 W.
Nowe procesory wzbogacają kamery termowizyjne o nowe funkcje, które jeszcze kilka lat temu w urządzeniach brzegowych nie istniały. Nową technologią w takich rozwiązaniach jest np. deep learning, czyli uczenie głębokie, funkcjonalność szczególnie istotna we współczesnej analizie wizyjnej. Usprawnia nie tylko detekcję uprzednio zdefiniowanych wzorców, ale także uczenie się kamery nowych wzorców na przestrzeni czasu. Takie funkcje jak deep learning potrzebują dużych mocy obliczeniowych, ponieważ w trakcie działania wykonuje się wiele złożonych operacji związanych chociażby z mnożeniem dużych macierzy liczbowych, co jest wymagane przy uczeniu się sieci neuronowych. Z tego powodu wydajność na poziomie kilku GFlops (1 GFlop = 1 mld operacji/s) jest tak ważna.
Zastosowanie dużych pamięci RAM w procesorze pozwala na przechowywanie tymczasowych danych, które powstają w trakcie uczenia głębokich sieci neuronowych.
Technologia deep learning, która do niedawna mogła być implementowana tylko na serwerach lub w chmurze, teraz może znaleźć się w kamerze. Jedną z bardzo pomocnych funkcji, szczególnie przy analityce wideo, jest zdolność budowania modeli 3D. Na podstawie ruchu obiektów, analizy głębi, czasem też przy wsparciu dodatkowych sensorów kamera buduje sobie model monitorowanej sceny. Dzięki temu możliwa jest korelacja wielkości obiektu i miejsca, w którym się on znajduje i porusza. Ułatwia to także śledzenie zauważonych obiektów nawet w bardzo złożonych scenach.
Za kilka lat, kiedy roboty do patrolowania obiektów staną się bardziej popularne, także kamery termowizyjne będą jednym z wielu „zmysłów”, w które zostanie wyposażony robot. Takie algorytmy będą niezbędne w jego codziennej pracy, zatem szybki rozwój w kolejnych latach to rzecz raczej pewna.
Termowizja i analiza obrazu
W zależności od tego, z jakiego algorytmu analizy wizyjnej chcemy korzystać, należy dobrać właściwą kamerę termowizyjną. Szczególnie jest to istotne, gdy planujemy stosowanie algorytmów wizyjnych innego producenta niż producent kamery. Wiele osób, dobierając kamerę do swojego projektu, posługuje się zasięgami podawanymi przez producentów kamer, które opierają się na kryterium detekcji, rozpoznania i identyfikacji. Kryteria te są wyliczane na podstawie opracowania Johna Johnsona z końca lat 50. XX wieku (rys. 1). W swojej pracy scharakteryzował on prawdopodobieństwo DRI (detekcja, rozpoznawanie, identyfikacja), opierając się na efektywnej rozdzielczości kamery.
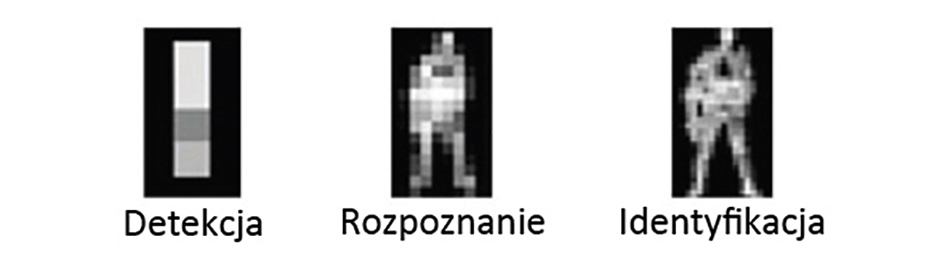
Obecnie dla kryterium detekcji przyjmuje się, że obiekt musi mieć wielkość minimum 1,5 x 1,5 piksela. Wielkość 1,5 piksela jest odpowiednikiem 0,75 cyklu dla przestrzennej rozdzielczości celu. W kryterium rozpoznania minimalna liczba pikseli wynosi 6 x 6, a dla identyfikacji 12 x 12 pikseli.
Projektanci dobierający kamery do systemów zabezpieczenia technicznego posługują się niejednokrotnie materiałami marketingowymi kamer termowizyjnych. Bez chwili refleksji nad tym, jaka jest różnica pomiędzy poszczególnymi kryteriami. Dobierają kamery w swoich projektach, opierając się właśnie na najniższym kryterium detekcji. Zapominają, że na końcu deklarowanego zasięgu obiekt wielkości człowieka będzie reprezentowany przez pojedyncze piksele. W przypadku trudnych warunków atmosferycznych będzie to nie do osiągnięcia. Bardzo gęsta mgła, ulewny deszcz lub gęsty śnieg skracają skuteczny zasięg działania. Nie można zakładać, że system analizy wizji zadziała prawidłowo, gdy na obrazie obiekt będzie miał wielkość 3–4 pikseli. Tak mała liczba punktów nie pozwala także na określenie charakterystyki obiektu, czyli prawidłowe zakwalifikowanie do jakiegokolwiek wzorca. Często współczesne algorytmy wizyjne pozwalają określić, czy obserwowany obiekt to osoba, pojazd, czy zwierzę (rys. 2). Prawidłowa kategoryzacja obiektu umożliwia eliminowanie niepożądanych alarmów spowodowanych np. przez przelatujące ptaki.
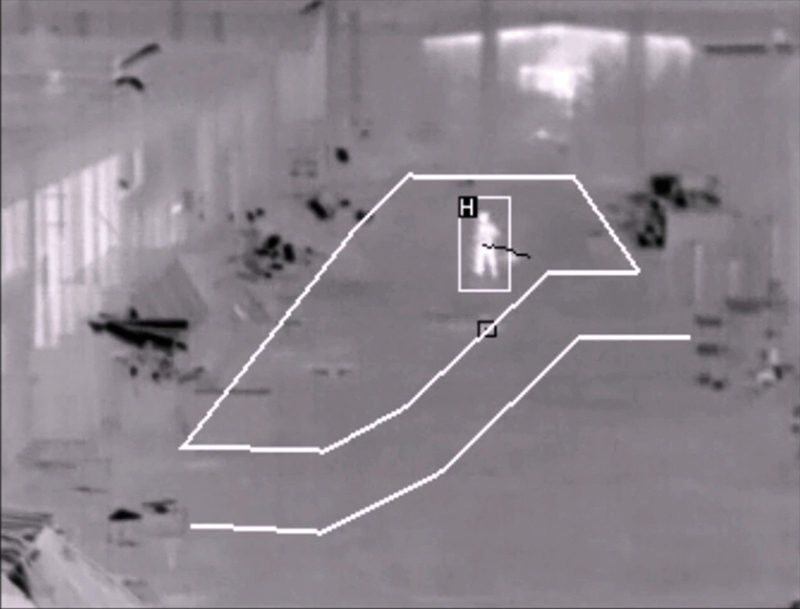
Litera H oznacza Human, czyli człowiek.
Jeśli stosując kamery termowizyjne, zamierzamy korzystać z algorytmów analizy wizyjnej, musimy zacząć od zapoznania się z dokumentacją techniczną tego rozwiązania. Najważniejsze są dwa podstawowe parametry działania danego algorytmu. Pierwszym z nich jest wielkość obiektu, jaki może zostać wykryty. Wartość ta jest podawana w pikselach lub procentowo, określając wysokość obiektu w stosunku do wysokości całego obrazu. W przypadku różnych algorytmów można znaleźć różne wartości. Producenci podają w swoich rozwiązaniach, że cel wielkości człowieka powinien mieć minimum 10 x 10 pikseli. U innego producenta można spotkać wymóg mówiący o liczbie pikseli na cel (POT – Pixel on Target), według którego cel wielkości człowieka powinien generować minimum 60 pikseli na obrazie. Taki opis jest oczywiście poprawny i ostatnio właśnie parametr POT staje się coraz bardziej popularny. Mimo prawidłowego wyliczenia liczby pikseli na cel przy planowanej odległości nie należy zapominać o warunkach atmosferycznych, które mogą wpływać na kontrast obrazu oraz widoczność celu. Z tego powodu trzeba pamiętać, że określany zakres wykrywania obiektu jest oceną statystyczną, która takie warunki powinna uwzględniać. Zatem przyjmowane w kalkulacjach graniczne wartości POT dla danego algorytmu mogą sprawić, że przy gorszej pogodzie obiekt nie zostanie prawidłowo zakwalifikowany lub nawet nie zostanie wykryty.
Drugim istotnym parametrem, który musimy sprawdzić, wybierając algorytm analizy wizji, jest rozdzielczość strumienia, na jakim pracuje. Niewiele algorytmów działa w wysokich rozdzielczościach. Często obraz wysyłany z kamery np. o rozdzielczości VGA (640 x 480 pikseli) jest przez algorytm skalowany do rozdzielczości niższej, np. CIF (352 x 288 pikseli) lub nawet QCIF (144 x 176 pikseli). To bardzo istotna kwestia przy obliczeniach POT, ponieważ nawet jeśli przetwornik kamery ma np. rozdzielczość VGA, a algorytm pracuje w rozdzielczości QCIF, to wszystkie wyliczenia liczby pikseli na cel powinny zostać wykonane właśnie dla tej niższej rozdzielczości. W przeciwnym wypadku, tzn. przy wyliczeniach dla wyższej rozdzielczości, zawyżamy nie tylko liczbę otrzymywanych pikseli, ale także skuteczny zasięg detekcji danej kamery i zastosowanego algorytmu analizy wizyjnej. W rezultacie w projekcie kamery zostaną umieszczone w zbyt dużych odległościach między sobą. Już na początku tworzymy wirtualne ogrodzenie, które będzie miało „olbrzymie dziury”. Trzeba także pamiętać o pewnym aspekcie ekonomicznym, który się tutaj pojawia. Im wyższa rozdzielczość kamery termowizyjnej, tym większa jej cena.
Choć ta zależność nie jest w pełni liniowa, nie ma sensu stosować kamer o bardzo wysokich rozdzielczościach, jeśli wybrany algorytm i tak pracuje na obrazach mniejszej wielkości. Nie przyniesie to bowiem żadnej poprawy skuteczności detekcji intruza, a przecież jest to cel stawiany najczęściej przed kamerami pracującymi w systemach ochrony perymetrycznej.
Wyższa rozdzielczość kamer ma przeważnie sens, gdy wybieramy kamery termowizyjne z wbudowaną analizą obrazu na pokładzie samej kamery. Wszystko to jest już obecnie możliwe dzięki coraz lepszym procesorom umieszczanym w kamerach. Producenci dostosowują działający na pokładzie kamery algorytm do jej rzeczywistej rozdzielczości, dzięki czemu wyższa rozdzielczość poprawia zasięg działania kamery.
Tworząc koncepcję systemów ochrony perymetrycznej, należy mieć na względzie kilka podstawowych aspektów. Budowany system ma na celu stworzenie wirtualnego ogrodzenia, które oddziela obszar zewnętrzny od właściwego obszaru chronionego obiektu. Zazwyczaj intruz ma być wykryty właśnie na etapie przekraczania tej wirtualnej linii. W niektórych przypadkach może być także wykrywany na zdefiniowanych obszarach. W takich aplikacjach kamery termowizyjne z niechłodzonym przetwornikiem obrazu dają zazwyczaj wystarczająco dobry obraz do wykorzystania wraz z analizą wizji. Oczywiście należy przy wyborze zwracać uwagę na parametry techniczne danego rozwiązania oraz na to, co może zaoferować wbudowany procesor.
Poza tym należy pamiętać o takim pozycjonowaniu kamer, aby wyeliminować wszystkie ewentualne martwe strefy, przez które intruz może przejść niezauważony (rys. 3 i rys. 4), a także o policzeniu wielkości celu dla zakładanych zasięgów pracy, aby spełniać kryteria wydajności wybranej analizy od początku do końca planowanego obszaru działania.
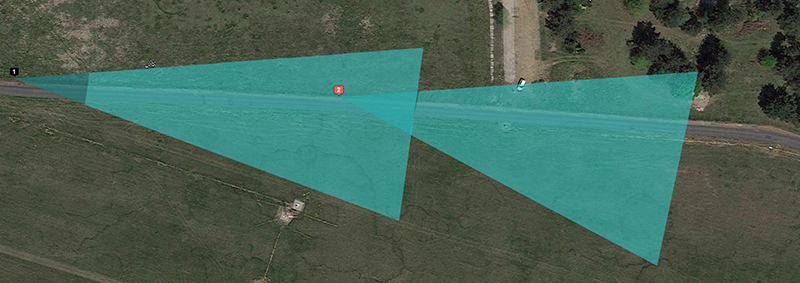
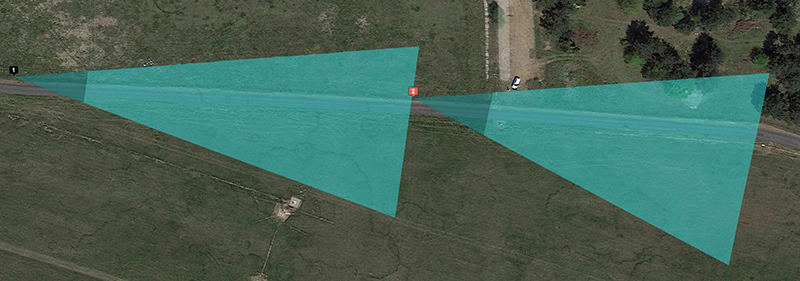
Martwa strefa kamery nr 2 znajduje się poza strefą efektywnego działania kamery nr 1.
Jeśli podczas projektowania przestrzegamy tych podstawowych zasad, szybko docenimy skuteczność działania systemów opartych na kamerach termowizyjnych, tak jak doceniła to firma Trigion. Wraz ze wzrostem świadomości na temat tej technologii będziemy obserwować ciągły wzrost jej popularności. Zapewne kolejne lata zaskoczą nas niejednokrotnie rozwojem tej technologii.
Literatura: [1] The Truth about range data: How to assess thermal camera range capability for site design purposes, John Love, DRS Commercial Infrared Systems White Paper, 2014 [2] Infrared: A Key Technology for Security Systems, “Advances in Optical Technologies”, Carlo Corsi 2012 [3] Advances in Infrared Detector Array Technology, Nibir K. Dhar, Ravi Dat and Ashok K. Sood 2013 [4] Best Practices Guide for Perimeter Security Applications – FLIR Systems [5] Fundamentals of Infrared and Visible Detector Operation and Testing, Second Edition, – John David Vincent 2016 [6] https://trigion.co.uk/trigion-proves-its-mettle-at-scrap-yard [7] http://www.iiviinfrared.com/Optical-Materials/ge.html [8] https://www.movidius.com/technology

