







Widzieć więcej

Jakub Sobek
Często można usłyszeć takie opinie i zarzuty formułowane pod adresem współczesnych systemów wizyjnych wyposażonych w różnego rodzaju algorytmy analityczne. Oczywiście można spotkać rozwiązania bardzo niskiej jakości, które skutecznie działają tylko „na ulotce”. Jednak wiele rozwiązań radzi sobie z detekcją intruzów bardzo dobrze. Charakteryzują się wysokim poziomem skuteczności detekcji przy zachowaniu niskiego progu fałszywych alarmów.
„Współczesne algorytmy analizy obrazu nadal się do niczego nie nadają. Miały działać tak fantastycznie, a okazuje się, że niczego nie wykrywają albo jest mnóstwo fałszywych alarmów. Trzeba za to płacić, a i tak nie działają tak jak powinny…”
Dlaczego zatem, nawet przy zaawansowanych algorytmach analizy wizyjnej, efekt działania systemów wizyjnych jest czasem niezadowalający? Czy zostały źle zaimplementowane? Czy to błędy w konfiguracji, projektowaniu, czy doborze sprzętu? Odpowiedź tak naprawdę jest dość prosta – jeśli na wejściu danego algorytmu obraz będzie niskiej jakości, efekt nigdy nie będzie zadowalający. Jeśli ludzkie oko ma problem z zauważeniem na ekranie intruza, to tym bardziej nie można spodziewać się pozytywnego rezultatu po algorytmie wizyjnym.
Działanie analizy wizyjnej
Na początek trzeba przynajmniej skrótowo wyjaśnić, jak działa analiza wizyjna. Choć użytkownik systemu efekty pracy analizy wizyjnej może zobaczyć na obrazie wysokiej jakości, np. w postaci obwiedni pojawiających się wokół obiektów, to trzeba pamiętać, że algorytmy nie pracują na takim obrazie, jaki jest widoczny na ekranie.
Przykładowo, jeśli w systemie stosujemy kamerę o rozdzielczości 3 Mpix, generującą obraz z prędkością 25 kl./s, to praktycznie żaden algorytm nie skorzysta ani z takiej jakości obrazu, ani z takiej liczby klatek. Pierwszym krokiem jego działania będzie obniżenie liczby klatek na sekundę, np. do 5-10, oraz obniżenie rozdzielczości obrazu do znacznie mniejszych rozmiarów. W zależności od producenta są to rozdzielczości między QCIF a VGA. Taki zabieg na wejściu logorytmów jest konieczny. Chodzi bowiem o obniżenie mocy obliczeniowych potrzebnych do przeanalizowania obrazu w wysokiej rozdzielczości i z dużą liczbą klatek.
Algorytm musi działać w czasie rzeczywistym, nie może dochodzić do jakichkolwiek nawarstwiających się opóźnień w jego funkcjonowaniu. Wymusza to wprowadzanie obrazu na wejściu w sposób strumieniowy. Nawet jeśli jakaś klatka nie dotrze w sposób prawidłowy, nie wykonuje się jej kolejnych retransmisji. Każda ponowna próba przesłania powodowałaby bowiem kolejne opóźnienia w czasie. W systemach zabezpieczenia technicznego powiadomienie alarmowe z analizy wizyjnej musi być generowane w czasie rzeczywistym. Nie ma mowy o kompromisie.
W drugim kroku każda klatka wcześniej przygotowanego strumienia wizyjnego w większości algorytmów jest poddawana procesowi binaryzacji, czyli konwersji obrazu kolorowego lub w skali szarości do obrazu o dwóch poziomach – obrazu binarnego. Zazwyczaj są to kolory biały i czarny, choć można spotkać rozwiązania stosujące kolory, np. czarny i czerwony. Dla skuteczności działania analizy wizyjnej dobór kolorów nie ma specjalnego znaczenia, istotne jest ich skontrastowanie między sobą. Przeprowadzenie binaryzacji na obrazie znacząco redukuje ilość przesyłanych informacji. Operacja binaryzacji najczęściej jest wykonywana metodą progowania. Ustala się tzw. wartość progową, poniżej której piksele przyjmują np. kolor biały, a powyżej kolor czarny (rys. 1). Binaryzacja pozwala na redukcję informacji zbędnych na obrazie i oddzielenie informacji istotnych z punktu widzenia dalszej analizy. Idea ta opiera się na założeniu, że dwie dominanty histogramu reprezentują dwie klasy obiektów – obiekty zainteresowania oraz tło. Takie założenie jednak nie musi być poprawne. Dlatego algorytmy bardziej zaawansowane wykorzystują inne, bardziej złożone metody progowania, np. progowanie iteracyjne metodą Otsu czy metodami entropijnymi. Każda z nich daje inne rezultaty i wymaga innej złożoności obliczeniowej. Dlatego dobór metody uzależnia się od dostępnej mocy procesorów sygnałowych oraz celów stawianych przed daną analizą wizyjną.

Tak przetworzony obraz jest kolejno poddawany różnym operacjom morfologicznym, polegającym m.in. na odszumianiu obrazu i oczyszczaniu z ewentualnych artefaktów, które mogą przeszkadzać we właściwym działaniu algorytmu detekcji.
Dopiero na tak przygotowanym obrazie zaczynają działać algorytmy wizyjne. Większość z nich korzysta z estymacji tła na bazie kilku wcześniejszych klatek, natomiast klatka bieżąca trafiająca do analizy jest odejmowana od tła. Dzięki temu analizowane są jedynie nowe obiekty pojawiające się w scenie. To, czy dany algorytm uzna obiekt za obiekt zainteresowania, zależy od jego wielkości, sposobu ruchu, przebytego dystansu w scenie lub czasu przebywania w monitorowanym obszarze. Jeśli obiekt spełnia założenia kryterium alarmowego, generowane jest zdarzenie alarmowe.
Mając pojęcie, jak działa większość algorytmów wizyjnych, należy zastanowić się, co ma wpływ na poprawę skuteczności ich działania. Skoro algorytmy działają na niskiej rozdzielczości, to wiadomo że wybór kamer o wysokich rozdzielczościach nie będzie miał wpływu na poprawę skuteczności. Z tego powodu jeśli wybierzemy kamerę IP o wysokiej rozdzielczości i kamerę analogową o tym samym kącie widzenia, przy założeniu że jakość obrazu z obu kamer jest porównywalna, to skuteczność wybranego rozwiązania analizy wizyjnej powinna być praktycznie taka sama. Warto więc pamiętać, że podnoszenie rozdzielczości kamer stosowanych w systemie nie zawsze podniesie skuteczność detekcji.
Zasięg detekcji danego algorytmu wizyjnego możemy natomiast poprawić, zmieniając kąt widzenia kamery – im węższy kąt obserwacji, tym większy zasięg pracy. Spowodowane jest to faktem, że zawężając kąt widzenia, zwiększamy szczegółowość obrazu w dalszych obszarach. Obiekt może zostać poprawnie wykryty przez dany algorytm, jeśli liczba pikseli reprezentująca obiekt w scenie będzie wystarczająca. W języku angielskim mówimy o parametrze Pixel on Target – określającym ile minimum pikseli musi zajmować np. osoba w scenie przy danej rozdzielczości, aby istniała możliwość skutecznej detekcji przez dany system.
Kolejnym bardzo istotnym czynnikiem wpływającym na jakość detekcji jest rodzaj zastosowanej kamery. W tym wypadku często projektanci lub instalatorzy stają przed wyborem typu kamery – kamera z wbudowanym oświetlaczem, zewnętrznym oświetlaczem, a może kamera termowizyjna? Tutaj wpływ na jakość działania algorytmów jest na tyle duży, że należy przyjrzeć się temu nieco uważniej.
Jaka kamera?
Ludzkie oko widzi część spektrum promieniowania elektromagnetycznego, zwanego potocznie światłem widzialnym. Nie widzi światła ultrafioletowego ani podczerwieni. Jeśli chodzi o kamery, mamy możliwość wyboru pomiędzy kamerami, które widzą w spektrum zbliżonym do ludzkiego oka, i takimi, które korzystają z innych zakresów fal.
Jednym z często powtarzanych błędów jest opinia, że podczerwień i emisja ciepła to dokładnie to samo. Tak jednak nie jest. Podczerwień można podzielić na pasma – bliska podczerwień obejmuje pasmo z zakresu 700-1000 nm, natomiast obrazowanie termiczne, czyli widzenie „ciepła”, to fale znacznie dłuższe.
Kamera z wbudowanym oświetlaczem
Są jednymi z najczęściej wybieranych kamer w systemach dozoru wizyjnego ze względu na wysoką ich dostępność oraz niską cenę takich rozwiązań. Instalacja kamer IP tego typu jest bardzo prosta – montując jedno urządzenie, instalujemy zarówno oświetlacz, jak i kamerę. Łatwe jest także okablowanie takiego systemu. Większość kamer wraz z oświetlaczem można zainstalować za pomocą pojedynczego przewodu ethernetowego, który podłącza urządzenie do sieci oraz pozwala na zasilanie przez PoE/PoE+. Dzięki temu w miejscu instalacji nie jest konieczne stosowanie dodatkowego zasilacza.
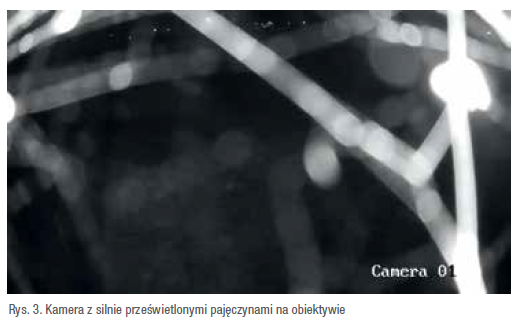
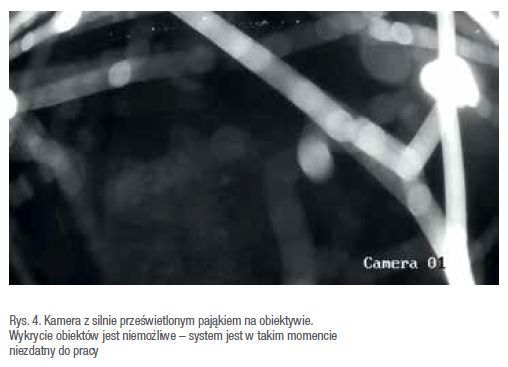
Czy takie z pozoru bardzo wygodne i przemyślane rozwiązanie ma jakieś wady? Niestety dość dużo. Oświetlacze w kamerach mają zazwyczaj bardzo niską jakość. Z tego powodu scena jest oświetlona bardzo nierównomiernie, niektóre obszary obrazu są bardzo mocno prześwietlone, a niektóre niedoświetlone. Często można także zauważyć niedopasowanie wbudowanego oświetlacza do kąta widzenia kamery – objawia się to niedoświetleniem boków monitorowanej sceny (rys. 2). Ponadto wbudowane oświetlacze wykorzystują zazwyczaj pasmo o długości fali 750 nm, emitują więc nie tylko podczerwień, lecz także fale widoczne dla ludzkiego oka. Zatem patrząc w ciemności w kierunku kamery, widać palące się na czerwono diody. Sprawia to, że monitoring nie jest już dyskretny i trudny do zauważenia. Jedną z najistotniejszych wad tego rozwiązania jest przyciąganie owadów przed obiektyw. Podlatują one do oświetlacza i przy dużym prześwietleniu przez znajdujący się blisko oświetlacz mogą wzbudzić wiele fałszywych alarmów. Taki oświetlacz prześwietla bardzo mocno także nawet niewielkie pajęczyny znajdujące się na obiektywie. Czasem prześwietlenie jest na tyle duże, że praktycznie nie widać monitorowanej sceny.

Kamera z zewnętrznym oświetlaczem
Dodanie zewnętrznych oświetlaczy do kamer pozwala na zastosowanie większych i znacznie silniejszych źródeł światła. Obszar może być oświetlony na znacznie większym dystansie i dzięki temu zasięg działania analizy wizyjnej w ciągu dnia oraz w nocy może pozostawać na podobnym poziomie. Zewnętrzne oświetlacze dobrej jakości także znacznie równomierniej oświetlają scenę dzięki możliwości zastosowania w takich lampach większej liczby diod IR oraz soczewek odpowiednio rozpraszających światło. Takie rozproszenie światła eliminuje prześwietlenia lub niedoświetlenia fragmentów sceny.
Na rynku jest bardzo wiele modeli oświetlaczy, zarówno o mniejszej mocy z szerokim kątem świecenia, jak i znacznie mocniejsze o wąskim kącie, które są szczególnie przydatne np. w ochronie perymetrycznej. Są też dostępne oświetlacze o długości fal np. 950 nm, niewidocznej dla ludzkiego oka.
Wadą zewnętrznych oświetlaczy jest także nieco wyższy koszt od rozwiązania zintegrowanego, konieczna jest bowiem instalacja dwóch osobnych urządzeń. Od strony instalacyjnej oświetlacze zewnętrzne mogą być zasilane na dwa sposoby – albo klasycznie z zasilacza, albo przez przewód sieciowy z wykorzystaniem PoE/PoE+. Na rynku są także oświetlacze, które można zdalnie konfigurować przez wbudowany web serwer. Dzięki temu lampę można zdalnie włączać lub wyłączać, a także np. sterować mocą świecenia. Rozwiązania typu VMS pozwalają na integrację takich rozwiązań i zarządzanie nimi.
Korzystając z analizy wizyjnej, trzeba pamiętać, by zewnętrzny oświetlacz był zainstalowany w pewnej odległości od kamery (np. 1 metr pod kamerą). Dzięki temu „odciągamy” owady od obiektywu kamer, a to skutkuje znacznym zmniejszeniem liczby fałszywych alarmów. Przy instalacji lamp trzeba zwrócić uwagę na kierunek ich świecenia i właściwy dobór mocy, aby oświetlacz, pracując z jedną kamerą, nie oślepiał pozostałych. Oświetlacz IR nie może być też zainstalowany zbyt nisko. Taka pozycja montażu powoduje, że nawet małe obiekty będą miały bardzo długi cień. Analiza obrazu może wówczas małe obiekty klasyfikować jako znacznie większe i system będzie generował dużą liczbę niepożądanych alarmów.

Kamera termowizyjna
To kolejne rozwiązanie pozwalające na widzenie w pasmie podczerwieni. Najpopularniejsze i najczęściej stosowane w systemach zabezpieczenia technicznego wykorzystują fale o długości z zakresu 7-14 μm. Rzadziej spotyka się kamery działające w paśmie 3-5 μm ze względu na ich znacznie wyższą cenę. Kamery termowizyjne charakteryzuje możliwość pracy w zupełnej ciemności – nie potrzebują one żadnych dodatkowych źródeł światła (np. oświetlacza IR), ponieważ nie wykorzystują efektu rejestracji światła odbitego. Kamera termowizyjna korzysta z emisji podczerwieni z obiektów obserwowanych. Każdy obiekt cieplejszy od zera stopni Kelvina, czyli tzw. zera bezwzględnego, emituje takie właśnie promieniowanie termiczne (cieplne).
Od wielu już lat kamery termowizyjne są coraz powszechniej stosowane w systemach dozoru wizyjnego. Duży wpływ na to ma spadek ceny, coraz więcej też osób docenia zalety tych rozwiązań. Jednym z atutów takich kamer jest znacznie skuteczniejsza obserwacja za ich pomocą nawet w trudnych warunkach atmosferycznych, np. w czasie mgły, opadów deszczu lub gęstego śniegu. Wprawdzie w takich warunkach może skracać się skuteczny dystans obserwacji, jest on jednak znacznie większy niż w przypadku tradycyjnych kamer.
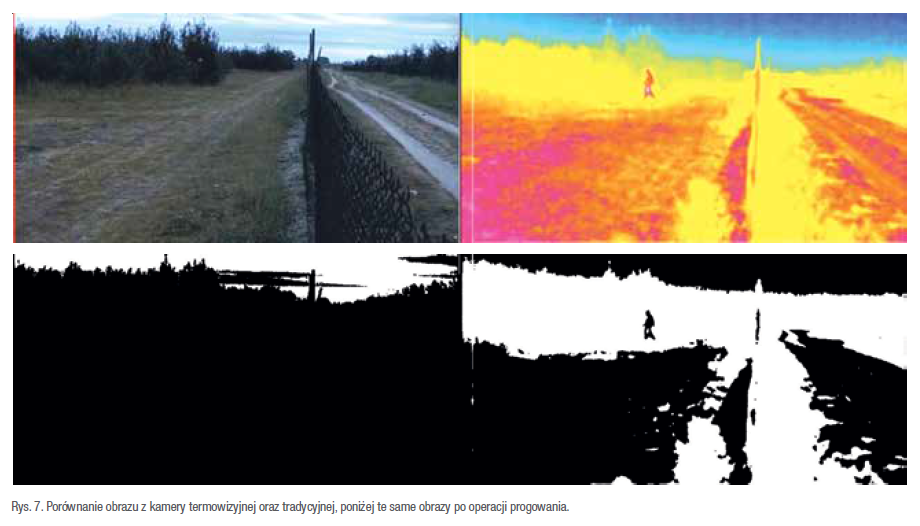
Bardzo istotna jest także wysoka czułość kamer termowizyjnych wynosząca 30-50 mK. Pozwala to na rozróżnienie obiektu od tła przy tak niewielkiej różnicy ich temperatury, jak 0,03-0,05 stopnia Celsjusza. Dzięki temu nawet obiekty pojawiające się w scenie są bardzo mocno skontrastowane z tłem. Wysoki kontrast obrazu ma bardzo pozytywny wpływ na znacznie skuteczniejsze działanie analizy obrazu. W takich strumieniach wizyjnych znacznie łatwiej dokonać wyodrębnienia obiektu z estymowanego tła. Znacznie łatwiej także wyznaczyć realne krawędzie obiektu i dużo precyzyjniej określić jego wielkość. To właśnie parametry opisujące wielkość obiektu często decydują, czy obiekt jest pozytywnie klasyfikowany, np. jako potencjalny intruz.
Kamera termowizyjna nie widzi światła widzialnego, dlatego nie widzi nawet długiego cienia za obiektem. Nie zakłóca jej widzenia światło zachodzącego lub wschodzącego słońca. Tradycyjne kamery mogą być przez światło słoneczne oślepiane, co uniemożliwia skuteczną obserwację chronionego obszaru i prawidłowe funkcjonowanie analizy wizyjnej. Kamery termowizyjnej nie można celowo oślepić nawet przez najsilniejsze źródło światła widzialnego lub wiązkę lasera, ponieważ są to długości fal, których taka kamera nie widzi.
Kolejną zaletą stosowania kamer termowizyjnych jest brak problemu przelatujących owadów, drobnych pajęczyn itp. przed obiektywem. Nawet jeśli owady przelatują przed kamerą, nie wpływają one na działanie analizy wizyjnej.
Choć wiele osób nadal wskazuje, że cena tych kamer jest wyższa od rozwiązań tradycyjnych, należy pamiętać, że kamera termowizyjna może obserwować znacznie większe dystanse. Wiele algorytmów analizy wizyjnej zoptymalizowanych do działania z takimi kamerami potrzebuje o połowę mniej pikseli na cel niż kamery z oświetlaczem. Tradycyjne kamery w ochronie perymetrycznej powinny być instalowane co ok. 50 m, natomiast kamery termowizyjne mogą być instalowane np. co 200-300 m, więc może ich być znacznie mniej. To duża oszczędność także kosztów instalacji, przestrzeni dyskowych potrzebnych do rejestracji obrazu czy np. liczby licencji w systemie VMS do wszystkich kamer.

Czy kamery termowizyjne mają jakieś wady?
Często stawianym im zarzutem jest niższa rozdzielczość i brak możliwości rozpoznania twarzy osoby wchodzącej np. w strefę perymetryczną. Pamiętajmy, że zazwyczaj osoba próbująca wtargnąć
na obiekt i tak ma zamaskowaną twarz, więc nawet tradycyjna kamera nie ma możliwości jej zidentyfikowania. Podstawowym celem kamer w systemach dozoru wizyjnego jest skuteczna detekcja intruza i maksymalne skrócenie czasu reakcji na zdarzenie. Takie możliwości zapewniają właśnie kamery termowizyjne.
Zatem lepiej szybko zareagować na pojawiające się zagrożenie, niż po fakcie, na podstawie zarejestrowanego wizerunku twarzy próbować odnaleźć osobę, która dokonała szkody. Lepiej zapobiegać zagrożeniom, niż działać po fakcie.
Podsumowanie
Choć nadal znacznie popularniejsze są kamery z wbudowanym lub zewnętrznym oświetlaczem podczerwieni, bardzo łatwo wskazać, jak wiele wad mają, gdy korzystają z wizyjnej analizy obrazu. Osoba, która ma nieco większą wiedzę na temat działania takich systemów, bez problemu oszuka większość algorytmów. Wystarczy odpowiedni strój oraz sprzyjające warunki pogodowe i oświetleniowe, by w sposób niezauważony wejść na teren chronionego obiektu.
Rozwiązaniem tego problemu jest dodatkowe wsparcie urządzeniami opartymi na innych technologiach detekcji. Mogą to być np. dodatkowe czujki PIR, bariery mikrofalowe, radary czy systemy światłowodowe. Korelacja takich systemów pozwala zwiększyć zabezpieczenie techniczne całego obiektu.
Olbrzymią przewagą kamer termowizyjnych jest ich bardzo wysoka czułość na pojawiające się w scenie obiekty.
Analiza obrazu na takich strumieniach działa znacznie skuteczniej, nawet na dużych odległościach. Liczba ewentualnych fałszywych alarmów także jest znacznie niższa, mniejsze jest obciążenie operatorów pracujących w zdalnych centrach monitorowania alarmów, wyższa ich wydajność pracy. Jeden operator może obsługiwać większą liczbę obiektów. W przypadku dużej liczby fałszywych alarmów z tradycyjnych kamer z analizą wizyjną dochodzi do uśpienia czujności operatora centrum monitoringu.
Wówczas nietrudno o pomyłkę i przeoczenie wśród wszystkich alarmów tego jednego, istotnego i realnego. Obecnie zauważalnym trendem jest obniżanie kosztów obsługi i czasu potrzebnego na zdalną obsługę obiektów. Zatem naturalnym kierunkiem jest popularyzacja kamer termowizyjnych. Każdy, kto chociaż raz wypróbuje współpracę kamer termowizyjnych z analizą obrazu, nie będzie chciał już wracać do kamer tradycyjnych.
LITERATURA:
C. M. Lee, K. E. Schroder, E. J. Seibel: Efficient image segmentation of walking hazards using IR illumination in wearable low vision aids, The Human Interface Technology Laboratory, University of Washington, Seattle, 2002 M. C. Maki, M. C. Dickie: New Options in Using Infrared for Detection, Assessment and Surveillance, Senstar, Canada 1996 Tae-Hyun Oh, Joon-Young Lee, In So Kweon: Real-time motion detection based on discrete cosine transform, Robotics and Computer Vision Lab, KAIST, Korea 2012 K. Verma, D. Ghosh, D. Pundir, A Kumar: Target Detection and Tracking in Infrared Videos Using Frequency Domain Analysis and Machine Learning for Surveillance, 5th IEEE Uttar Pradesh Section International Conference on Electrical, Electronics and Computer Engineering (UPCON) 2018 P. Battalwar, J. Gokhale, U. Bansod: Infrared Thermography and IR Camera, International Journal of Research In Science & Engineering e-ISSN: 2394-8299 Volume: 1 Issue: 3, 2013
|
 |